Max,多模态四足机器人。
本页面主要目录有关于Max的:简介、发展等介绍

Max,多模态四足机器人。
本页面主要目录有关于Max的:简介、发展等介绍
Max
2021年3月2日,腾讯Robotics X实验室正式发布。
Max与传统足轮融合方案相比,这一新设计可使Max在轮式运动下能耗降低一半,运动速度最高可达25公里/小时。
在运动规划与控制算法上,Max延续并创新了腾讯Robotics X实验室推出的第一只机器狗Jamoca的鲁棒控制算法。
采用鲁棒控制算法的系统,往往在某类特定不确定性的条件下,能保持稳定性、渐近调节和动态性能不变。
2021年3月2日,腾讯正式发布首个软硬件全自研的多模态四足机器人Max,其采用创新性的足轮融合一体式设计,有腿又有轮,不仅拥有“崎岖路面走得稳,平坦路面跑得快”的特长,还能双腿站立“拜年讨红包”。
2022年8月8日消息,腾讯正式发布Max二代机器人,机器人由腾讯Robotics X实验室自研,是腿轮一体的多模态四足机器人。

新亚洲娱乐(英文名:ASIA ENTERTAINMENT GROUP LIMITED,全称:新亚洲娱乐联盟集团有限公司)是一家以从事戏剧制作人及杂项戏剧服务为主的企业,成立于1999年,位于香港特别行政区。旗下分公司包括虎威艺能创作有限公司(TGS HK)、稻草人娱乐创作社(Scarecrow Entertainment)、虎威王朝音乐创作股份有限公司(TGS Music)、虎威活力娱乐传播有限公司(TGS Taiwan)、AK Entertainment(Korea)以及AEG Korea等。
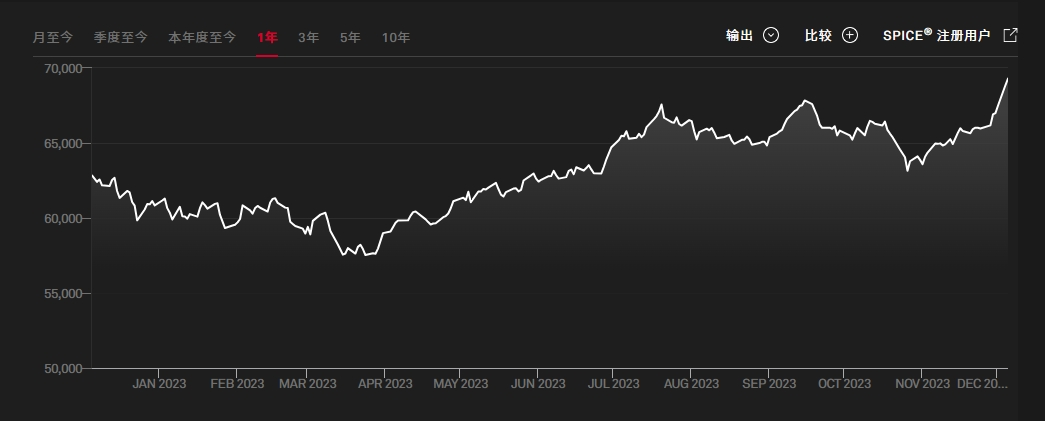
印度孟买SENSEX30指数(又称孟买敏感指数)为印度最被广泛使用的指数,为投资印度的重要参考指标,是由孟买证券交易所发行。由于各类媒体提到的“印度股市”,实际上都是孟买股票交易所,因此,该交易所的SENSEX-30指数几乎成了印度股市的代名词。




