张震,清华大学机械工程系副教授,2009美国控制学会专题分会最佳论文奖获得者。
本页面主要目录有关于张震的:人物经历、主讲课程、研究方向、主要贡献等介绍

张震,清华大学机械工程系副教授,2009美国控制学会专题分会最佳论文奖获得者。
本页面主要目录有关于张震的:人物经历、主讲课程、研究方向、主要贡献等介绍
中华人民共和国
汉
机电一体化;数控技术等
清华大学机械工程系副教授
上海交通大学、清华大学、美国范德比尔特大学、美国俄亥俄州立大学
2009美国控制学会专题分会最佳论文奖获得者等
发表SCI、EI 论文 30 余篇
2007: 美国俄亥俄州立大学(The Ohio State University, Columbus OH)电子与计算机工程系 Ph.D.。
2003: 美国范德比尔特大学(Vanderbilt University)机械工程系 硕士。
2001: 清华大学 精仪系 硕士。
1998: 上海交通大学 仪器工程系 学士。
2009.11至今: 清华大学精密仪器与机械学系、机械工程系 助理研究员、副教授。
2007 - 2009.10: 美国明尼苏达大学机械工程系(The University of Minnesota, Twin Cities)博士后。
美国机械工程师学会动态系统与控制学部(ASME Dynamic Systems & Control Division)会议编委。
国际会议 American Control ConferenceAssociate Editor。
国际会议 ASME Dynamic Systems Control ConferenceAE, 分会副主席。
美国机械工程师学会(ASME)会员。
美国电气电子工程师学会(IEEE)会员。
控制领域主要国际期刊 IEEE Transactions on Automatic Control, Automatica, IEEE Transactions on Control Systems Technology 等 审稿人。
- 研究生课程“计算机数控技术”。
- 研究生课程"线性系统控制"。
- 超精密伺服系统设计、建模和控制及其在先进制造装备中的应用。
- 时变系统的轨迹跟踪控制和扰动去除,特别是变速(变频)系统的伺服控制。
- 机电一体化;数控技术。
主要研究方向:超精密伺服系统设计、建模与控制及其在先进制造装备中的应用,特别是高速、变速(变频)系统中的高精度轨迹跟踪控制和扰动去除。研究特色:融会非线性控制领域中的微分几何学派和机电控制学科的思想和方法,强调以设计、建模与控制一体化的方法,研究可显著提高超精密机电系统、先进制造装备系统性能的使能技术。
-国家自然科学基金科学仪器基础研究“面向量子功能器件制备的直写式真空蒸发系统”合作方负责人。
- 国家自然科学基金“时变系统跟踪控制理论”负责人。
-教育部博士点基金“线性时变重复控制器设计”负责人。
-美国通用汽车研发中心“无凸轮式发动机可变气门执行机构系统的控制”。
在国际期刊和全文经同行评审的国际会议上发表SCI、EI 论文 30 余篇。Google Citations 198次,单篇最高引用53次;授权和申请中国发明专利5项。代表性论文如下:
国际期刊论文(Journal Articles)
- Z. Zhang, P. Yan, H. Jiang and P. Ye, A discrete time-varying internal model-based approach for high precision tracking of a multi-axis servo gantry, ISA Transactions, 2014. DOI 10.1016/j.isatra.2014.04.006.
- V. Gupta, Z. Zhang and Z. Sun. Modeling and control of a novel pressure regulation mechanism for common rail fuel injection systems. Applied Mathematical Modeling, vol. 35(7): pp 3473-3483, 2011.
- Z. Zhang and A. Serrani. Global robust output regulation with generalized immersion. Dynamics of Continuous, Discrete and Impulsive Systems Series A, vol. 17 (6): 909-922, 2010.
- Z. Zhang and Z. Sun. A novel internal model-based tracking control for a class of linear time-varying systems. ASME Journal of Dynamic Systems, Measurement, and Control, vol. 132 (1): 011004-1-10, 2010.
- Z. Sun, Z. Zhang and T.-C. Tsao. Trajectory tracking and disturbance rejection of linear time-varying systems: Input/output representation. Systems & Control Letters, vol. 58 (6): 452-460, 2009.
- Z. Zhang and A. Serrani. Adaptive robust output regulation of uncertain linear periodic systems. IEEE Transactions on Automatic Control, vol. 55 (2): 266-278, 2009.
- Z. Zhang and A. Serrani. The linear periodic output regulation problem. Systems & Control Letters, vol. 55(7): 518-529, 2006.
- M. Ji, Z. Zhang, G. Biswas and N. Sarkar. Hybrid fault adaptive control of a wheeled mobile robot. IEEE/ASME Transactions on Mechatronics, vol. 8 (2): 226-233, 2003.
全文经同行评审的国际会议论文(Peer Reviewed Conference Proceedings)
- Z. Zhang, P. Yan, and P. Wang, Discrete Time-Varying Internal Model-Based Control of a Novel Parallel Kinematics Multi-Axis Servo Gantry, In Proceedings of the 2014 IFAC Control Congress, Cape Town, South Africa, 2014.(特邀论文)
- P. Wang, Z. Zhang, P. Yan, et al, Design, modeling and control of a novel parallel kinematics servo gantry for high precision tracking, In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 2014.
- Z. Zhang, C. Lu, T. Leng, et al, A discrete time-varying internal model approach for high precision tracking, In Proceedings of the 2013 European Control Conference, Zurich, Switzerland, pp. 1353-1358, 2013.
- Z. Zhang, P. Yan, C. Lu, et al, Time-varying internal model based tracking control for a voice coil motor servo gantry, In Proceedings of the 2013 American Control Conference, Washington DC USA, pp. 2278-2283, 2013.
- Z. Zhang, P. Yan, P. Ye, Time-varying repetitive control for periodic error elimination in PWM DC/AC converter systems, In Proceedings of the 32nd Chinese Control Conference, Xi’an, pp. 5594-5599, 2013.
- Z. Zhang, C. Lu, Z. Sun, and P. Ye, A time-varying internal model-based tracking control with a robust stabilizer, In Proceedings of ASME Dynamic Systems Control Conference, pp. 171-177, Ft. Lauderdale, FL USA, 2012.
- Z. Zhang, Z. Sun and P. Ye. An internal model-based tracking control for a class of uncertain linear time-varying systems. In Proceedings of the 2010 ASME Dynamic Systems and Control Conference, DSCC2010-4271, Cambridge, MA, 2010.
- V. Gupta, Z. Zhang and Z. Sun. A novel pressure control mechanism for common rail fuel injection systems. In Proceedings of the 2009 ASME Dynamic Systems and Control Conference, DSCC2009-2714, Hollywood, CA, 2009. (特邀论文)
- Z. Zhang and Z. Sun. A novel internal model-based tracking control for a class of linear time-varying plants. In Proceedings of the 2009 American Control Conference, pp 5339-5344, St. Louis, MO, 2009.
- Z. Zhang and Z. Sun. Rotational angle based pressure control of a common rail fuel injection system for internal combustion engines. In Proceedings of the 2009 American Control Conference, pp 2690-2695, St. Louis, MO, 2009. (特邀论文)
- Z. Zhang and A. Serrani. Semiglobal robust output regulation with generalized immersion. In Proceedings of the 2008 American Control Conference, pp 375-376, Seattle, WA, 2008.
- Z. Zhang and A. Serrani. Further results on adaptive robust periodic regulation. In Proceedings of the 2007 American Control Conference, pp 2594-2599, New York, NY, 2007.
- Z. Zhang and A. Serrani. Robust regulation with adaptive periodic internal models. In Proceedings of the 2006 IEEE Conference on Decision and Control, pp 5246-5251, San Diego, CA, 2006. (特邀论文)
- Z. Zhang and A. Serrani. The linear periodic output regulation problem. In Proceedings of the 2005 Joint IEEE Conference on Decision and Control and European Control Conference, pp 3327-3332, Seville, Spain, 2005.
- Z. Zhang, N. Sarkar and X. Yun. Supervisory control of a mobile robot for agile motion coordination. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, vol. 3: 2196-2203, New Orleans, LA, 2004.
- Z. Zhang, M. Ji and N. Sarkar. Dexterous trajectory tracking control of a mobile robot, In Proceedings of the 2003 ASME International Mechanical Engineering Congress and Exposition, IMECE2003-43493, pp 751-758, Washington, DC, 2003.
发明专利 (Patents)
- 并联运动解耦伺服控制平台 201210575659.0。
- 一种多定子多动子阵列式直线电机驱动装置 201110139285.3。
- 抗扭转并联双驱运动解耦伺服平台 201310272207x。
- 高刚度并联双驱运动解耦伺服平台 201310157124.6。

新亚洲娱乐(英文名:ASIA ENTERTAINMENT GROUP LIMITED,全称:新亚洲娱乐联盟集团有限公司)是一家以从事戏剧制作人及杂项戏剧服务为主的企业,成立于1999年,位于香港特别行政区。旗下分公司包括虎威艺能创作有限公司(TGS HK)、稻草人娱乐创作社(Scarecrow Entertainment)、虎威王朝音乐创作股份有限公司(TGS Music)、虎威活力娱乐传播有限公司(TGS Taiwan)、AK Entertainment(Korea)以及AEG Korea等。
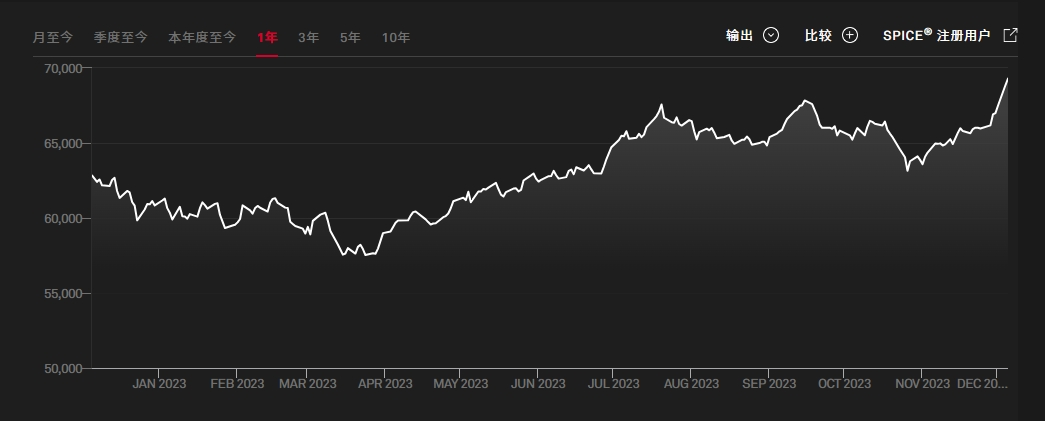
印度孟买SENSEX30指数(又称孟买敏感指数)为印度最被广泛使用的指数,为投资印度的重要参考指标,是由孟买证券交易所发行。由于各类媒体提到的“印度股市”,实际上都是孟买股票交易所,因此,该交易所的SENSEX-30指数几乎成了印度股市的代名词。




