杨莹,中国汉族,现任北京大学力学与工程科学系副系主任、教授及博士生导师。主要研究领域包括非线性系统控制、故障诊断与容错控制以及鲁棒与最优控制。
本页面主要目录有关于杨莹的:教育经历、研究领域、课题研究、获得荣誉、主要论文列表等介绍

杨莹,中国汉族,现任北京大学力学与工程科学系副系主任、教授及博士生导师。主要研究领域包括非线性系统控制、故障诊断与容错控制以及鲁棒与最优控制。
本页面主要目录有关于杨莹的:教育经历、研究领域、课题研究、获得荣誉、主要论文列表等介绍
杨莹
中华人民共和国
女
汉族
燕山大学
教师
教授
1994年 于燕山大学电气工程学院获工学学士学位
1999年 于燕山大学电气工程学院获工学硕士学位
2002年 于北京大学力学与工程科学系获理学博士学位
2004年11月 北京大学力学与工程科学系博士后出站
2004.12-2014.7 北京大学力学与工程科学系,讲师、副教授
2010.2-2011.2 德国杜伊斯堡-埃森大学,访问学者
2014.8至今北京大学力学与工程科学系,教授
鲁棒控制,复杂系统控制,多平衡点系统总体性质,协调控制
国家自然科学基金面上项目《柱面空间上周期解的鲁棒性分析与控制》,项目负责人,2005.1--2007.12, 23万
国家自然科学基金重点项目《复杂非线性力学系统的控制研究》,主要成员,2004.1--2007.12
国家自然科学基金面上项目《不确定多平衡点非线性系统的总体性质及鲁棒控制》,主要成员,2003.1--2005.12
北京大学工程研究院科研合作平台建设计划项目 《以航空航天为背景的复杂非线性力学系统控制研究》,主要成员,2005.1--2006.12
2015国家自然科学二等奖(排名第五)
2014中国自动化学会自然科学奖二等奖(排名第一)
2013北京大学优秀班主任
2011教育部高等学校自然科学奖一等奖(排名第四)
2005北京大学青年教师教学基本功竞赛三等奖
黄琳,杨莹,耿志勇,王金枝,段志生,系统动态性能的多样性分析与控制--后绝对稳定性研究,控制理论与应用,22(1): 1--9, 2005
富饶,杨莹,黄琳,μ分析的线性矩阵不等式方法及其优化算法,控制与决策,19(3): 247--251, 2004
杨莹,黄琳,摄动类摆系统的总体性质及鲁棒稳定性, 控制理论与应用,20(1): 8-12, 2003
杨莹,黄琳,基于LMI的非线性摄动系统鲁棒绝对稳定性判据, 自动化学报,29(6): 932-936, 2003

新亚洲娱乐(英文名:ASIA ENTERTAINMENT GROUP LIMITED,全称:新亚洲娱乐联盟集团有限公司)是一家以从事戏剧制作人及杂项戏剧服务为主的企业,成立于1999年,位于香港特别行政区。旗下分公司包括虎威艺能创作有限公司(TGS HK)、稻草人娱乐创作社(Scarecrow Entertainment)、虎威王朝音乐创作股份有限公司(TGS Music)、虎威活力娱乐传播有限公司(TGS Taiwan)、AK Entertainment(Korea)以及AEG Korea等。
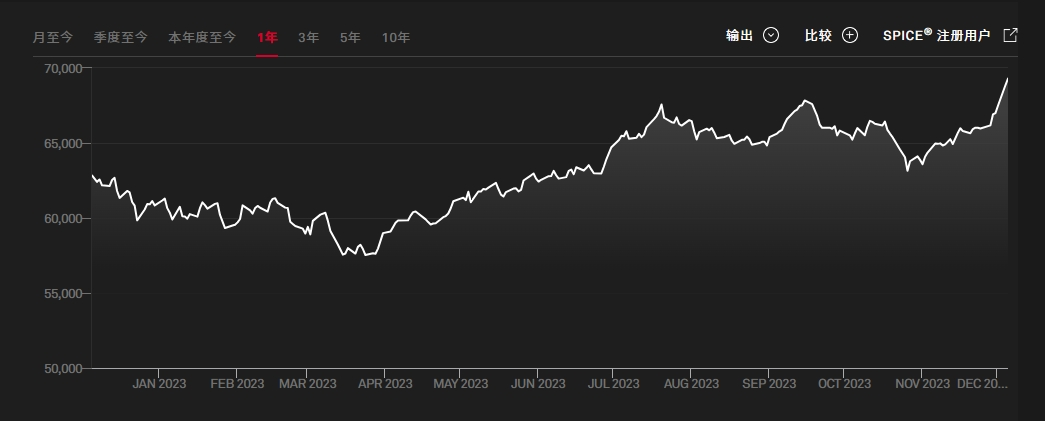
印度孟买SENSEX30指数(又称孟买敏感指数)为印度最被广泛使用的指数,为投资印度的重要参考指标,是由孟买证券交易所发行。由于各类媒体提到的“印度股市”,实际上都是孟买股票交易所,因此,该交易所的SENSEX-30指数几乎成了印度股市的代名词。




