发展历史
自从开普勒提出了他的第二行星运动定律,人们就已获知,在相同的时间间隔内,太阳和行星之间的连线扫过的面积是相等的。牛顿提出了独特的几何证明,进一步证实了太阳引力的吸引力是导致所有开普勒定律的原因。在《原理》一书中,牛顿在讨论第一运动定律的例子时,暗示了角动量的概念。他通过对面积定律的几何证明,间接证明了在受到中心力的情况下,角动量是守恒的。
莱昂哈德·欧拉(Leonhard Euler)、丹尼尔·伯努利(Daniel Bernoulli)和帕特里克·达西都(Patrick Darcy)都从面速度守恒的角度理解角动量,这是他们对开普勒行星运动第二定律分析的结果。1736 年,欧拉像牛顿一样,在《力学》一书中提到了一些角动量方程,但并未对这些方程进行进一步的探讨。 伯努利在1744 年的一封信中写到了“旋转运动的力矩”,这可能是我们现在理解的第一个角动量概念。1799 年,皮埃尔-西蒙·拉普拉斯 (Pierre-Simon Laplace)首次意识到固定平面与旋转相关——拉普拉斯不变平面。路易·波因索(Louis Poinsot)于1803年开始将旋转表示为垂直于旋转的线段,并详细阐述了“力矩守恒”。1852 年,莱昂·福柯(Leon Foucault)在一项实验中使用陀螺仪来显示地球的自转。
威廉·兰金(William Rankine)在1858 年的《应用力学手册》首次定义了现代意义上的角动量:一条线,其长度与角动量的大小成正比,其方向垂直于物体和固定点的运动平面。当从线的末端观察物体的运动时,物体的半径矢量符合右螺旋法则。
定义
经典力学中的定义
二维轨道角动量
角动量是一个矢量(更准确地说,是伪矢量),表示物体绕特定轴的旋转惯量和旋转速度(以弧度/秒为单位)的乘积。然而,如果粒子的轨迹位于单个平面内,则可以忽略角动量的矢量性质,并将其视为标量(更准确地说,伪标量)。角动量可以被认为是线性动量在旋转过程中的表现。因此,正如线性动量
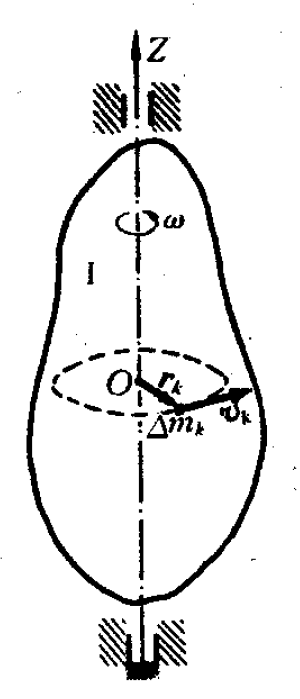
将两边投影到质点k圆轨迹切线方向,有:

工业技术
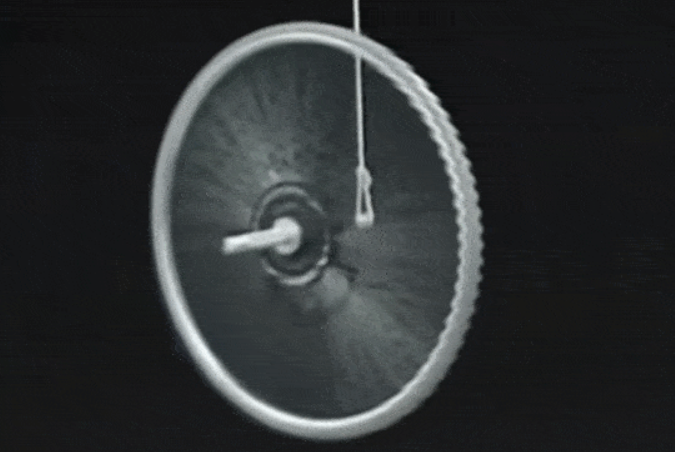
角动量守恒定律在实际应用中有很多优势。在蒸汽机或内燃机等发动机中,常常需要使用飞轮,这个装置能够有效地将活塞的横向运动转化为旋转运动。惯性导航系统就是利用了角动量相对于空间惯性系守恒的原理,使得潜艇能够在极地冰盖下航行,同时对于所有现代导航方式都至关重要。旋转的陀螺具有很好的定轴性,这也是因为其遵守了角动量守恒的原理,即在没有外力矩的作用下,物体的角动量会保持恒定。在工业中,可以看到很多这样的例子,比如子弹从枪膛里出来时高速旋转,这样就能够保持稳定性和准确性。角动量守恒定律还可以用来实现卫星的定向控制。而在一些轿车上,就安装了测量车身纵向和横向摆动的陀螺传感器,这样可以实现车身稳定度的控制。
在骑车的时候会发现骑得越快,越容易保持平衡,是因为在陀螺效应的作用下,轮子克服了重力,形成了进动,通过改变方向维持了自身平衡。而这种平衡状态与车轮的速度有关,速度越快,车轮的倾角越小,车身越稳定