西门子S7-200如何通过向导设定PID?
全部 1026
西门子S7-200如何通过向导设定PID?
-
这个不是照着向导的步骤做就可以了么?
不过答题嘛,还是要说的稍微详细点,看图吧:
我这个是在西门子200 Mirco/win软件中的,smart的应该和这个也差不多,所以就说这一个了。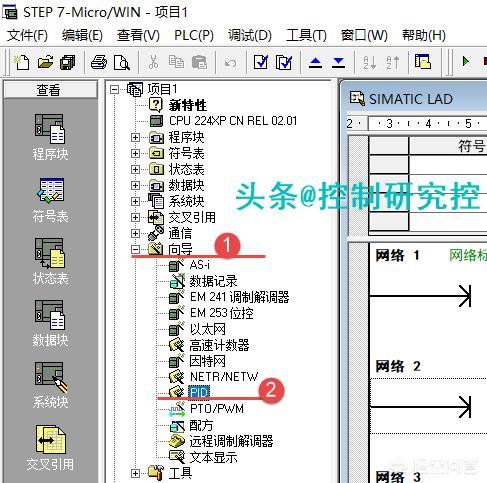
首先找到圆圈①处的向导,然后找到②处的PID,双击,就会出现向导对话框:
这里有0-7个PID控制回路,总共8个,这里我就选择0,这8个回路的意思是,相当于只提供8个PID运算的功能块。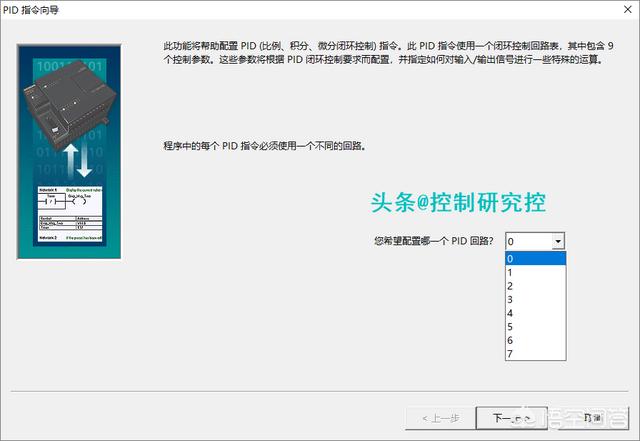
继续向下:
这个图上上边的给定值,也就是设定值,就是你希望能稳定在的值,这里是指定给定值的范围是0-100%。然后下边就是PID的参数设置,和这个PID运算执行的频率1秒执行1次!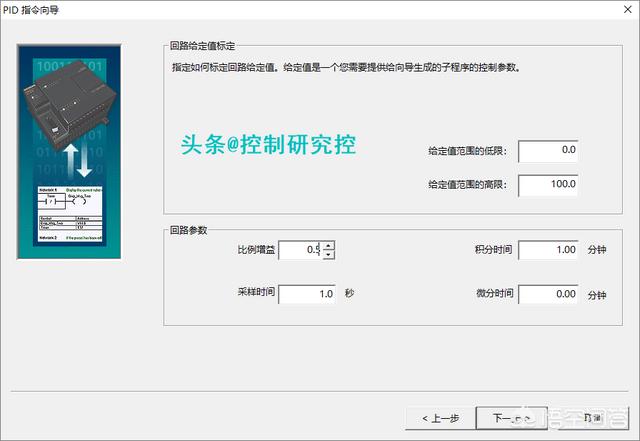
这个图片上边是PV值,就是反馈值,也要转化为和给定值一样的0-100%的数据。下边部分是经过PID运算后的输出值。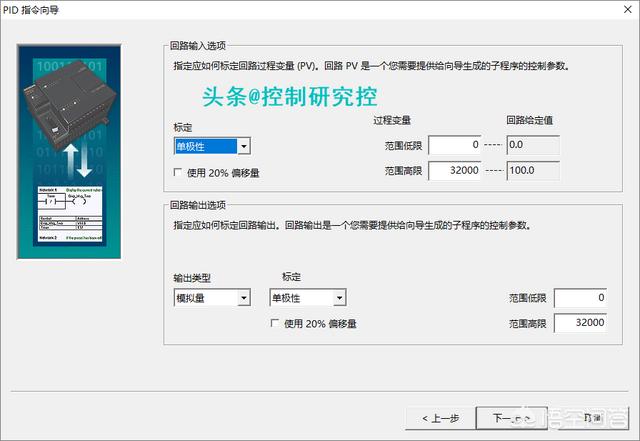
这个图片是设定PV反馈值的报警范围,比如低于10%就报低报警!这里我就不设置了!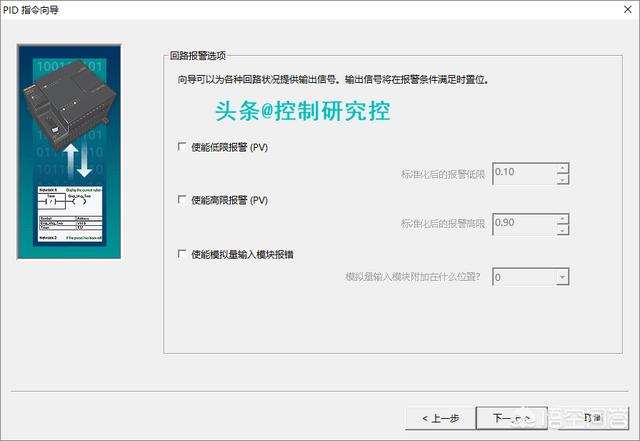
继续向下看:
这个图片是向导生成这个指令,需要占用一些V区的内存,如图这里占用VB0-VB119,那么在程序的其他地方,这120个字节地址就都不能使用了。如果你一定要使用,将会出错!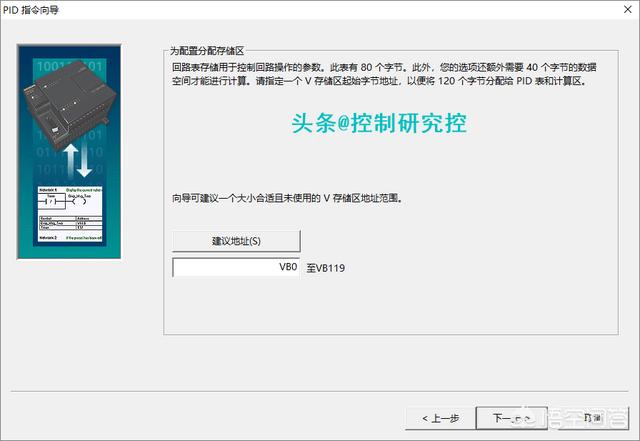
这个图片是按照向导生成2个子程序,一个是PID程序,一个是中断程序!你可以自己给这两个程序命名!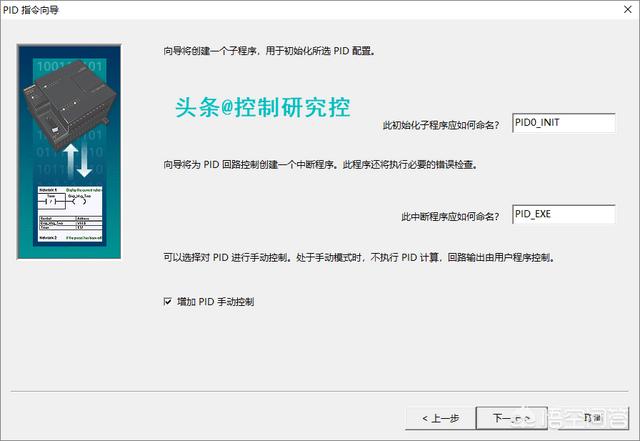
这里,增加PID手动控制,一般是建议勾选的!
这个图片就是根据向导已经完成了,提示你一些信息!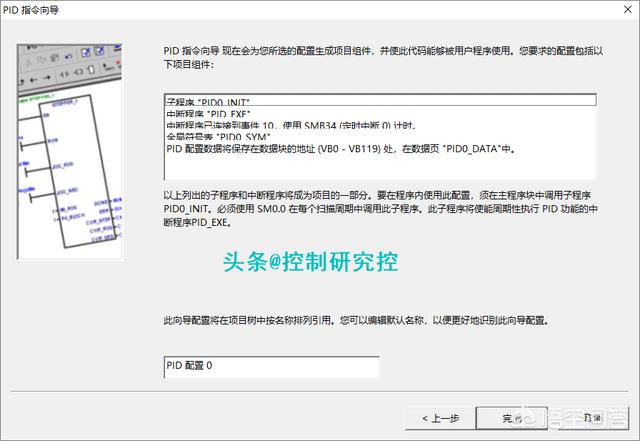
完成向导后,程序中就出现了,PID_INIT和PID_EXE这2个程序块,就可以直接使用了!
这个图片就是PDI0_INIT的中一些参数的说明!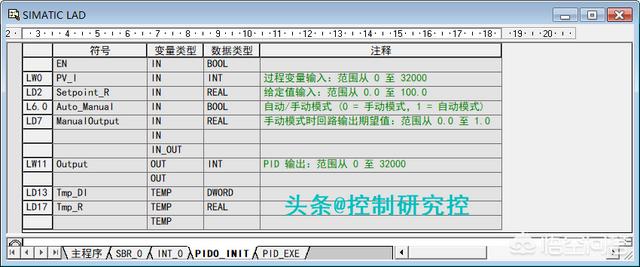
就说这么多了,希望对你有点用,谢谢!
2019-06-30 13:06:11