无人驾驶,超不超车怎么判断与解决?
全部 1012
无人驾驶,超不超车怎么判断与解决?
-
通过激光雷达,差分GPS,摄像头,超声波雷达,和无线射频识别系统以及霍尔传感器、控制单元等硬件设施进行分析判断。
2019-12-14 11:07:12 -
传感器传输,和程序算法。这个是工程师们的事。,至于做出判断的准确性,肯定不会比人更灵活,但是判断时机一定比人快,并且稳妥,各有利弊。
2019-12-12 09:08:42 -
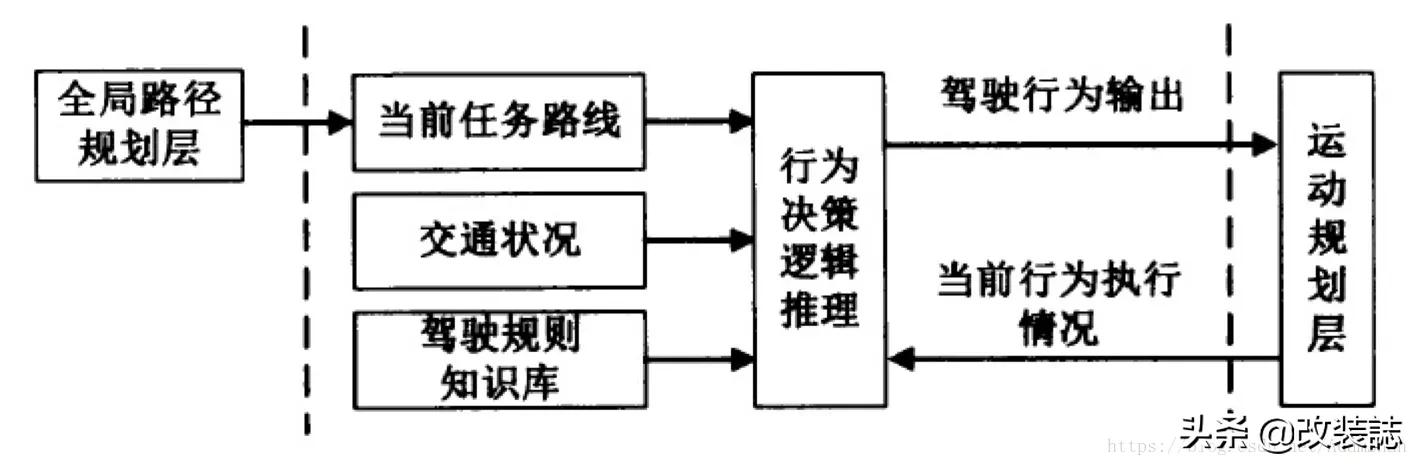
无人驾驶车都是有行为规划的,行为规划是位于全局任务规划和底层的动作规划层之间,驾驶行为规划也被称为驾驶行为决策,这一层的作用主要是依据来自上层(任务规划层)的全局最优行驶路线信息,根据当前的交通场景和环境感知的信息的理解,来确定自身当前驾驶状态,在交通规则的约束和驾驶经验的指导下规划出合理的驾驶行为。
无人车决策规划系统大致可以总结为两点:
1.
合理性:无人车驾驶的合理性建立在两个基础之上——交通法规和驾驶经验,其中交通法规的优先级又要高于驾驶经验,交通法规需要考虑的内容包括:靠右侧车道行驶,不能超速,换到超车时应提前开启转向灯,对于感知到的交通信号灯和交通标志,应按照其只是内容行驶,出现任何危险情况,应当能够果断地执行紧急制动等等。驾驶经验需要考虑的内容主要包括:尽量保持在原车道,不应随意变道;城市路段行驶时,不应随意加速,确保驾驶的平顺性;对于前车行驶缓慢而条件运行的情况应当果断超车等等。
2.实时性:任何无人车系统中的行为规划都是实时的,行为规划应当能够处理复杂的动态交通场景,并且能够根据环境的变化快速的调整驾驶行为以避免危险的发生。
 2019-12-11 16:12:49
2019-12-11 16:12:49 -
通过电脑判断车距与前车车速动态进行智能判断,为避免引发交通事故自动驾驶车辆还需和有人驾驶一样需要提前打开超车转向灯并交替灯光提示前车,在具备超车条件的情况下通过车载电脑实现自动超车
2019-12-11 16:27:23